CONF-APMM 2025
The 3rd International Conference on Applied Physics and Mathematical Modeling (CONF-APMM 2025) was a hybrid conference which includes several symposium series (offline and online) around the world. Dr. Mustafa Istanbullu from Çukurova University, Dr. Shuxia Zhao from Dalian University of Technology, Dr. Marwan Omar from Illinois Institute of Technology, and Dr. Anil Fernando from University of Strathclyde have chaired these symposium series on related topics. CONF-APMM 2025 provided the participants with good opportunities to exchange ideas and build networks, and it will lead to further collaborations between both universities and other societies.
Symposium
Department of Biomedical Engineering, Faculty of Engineering, Çukurova University
Symposium Chair: Dr. Mustafa Istanbullu, Assistant Professor in Çukurova University
The symposium titled “Controlling Robotic Manipulators Using PWM Signals with Microcontrollers” provided participants with both theoretical knowledge and practical skills in robotic control systems. The session began with an introduction to the fundamental principles of robotic manipulators, emphasizing their structure, degrees of freedom, and kinematic modeling. Using a small-scale 3–4 DOF robotic arm, participants observed how link–joint configurations translate into end-effector motion and how kinematic concepts such as forward and inverse kinematics underpin modern manipulator control.
A central focus of the symposium was the role of Pulse Width Modulation (PWM) in actuation. PWM was presented as a cost-effective and efficient method for controlling servo and DC motors. The widely used SG90 micro servo motor was introduced as the primary actuator in the demonstration system. Its operational characteristics—approximately 180° of rotation and straightforward PWM-based position control—were highlighted as ideal for educational and prototyping purposes.
The symposium further explored how microcontrollers such as Arduino or PIC can generate PWM signals for real-time robotic control. Participants engaged in hands-on activities, including hardware setup, wiring, and basic programming to drive servo motors. Through guided exercises, they implemented simple pick-and-place tasks, tested motion strategies, and tuned joint responses.
Although the official language of the symposium was English, the hands-on demonstration part was conducted in Turkish upon participants’ request, since there were no international attendees. This ensured clearer understanding and more active engagement during practical sessions.
By bridging the gap between microcontroller programming and applied robotics, the symposium successfully provided attendees with a practical foundation for designing, programming, and controlling robotic systems.




ITM Department, Illinois Institute of Technology, USA
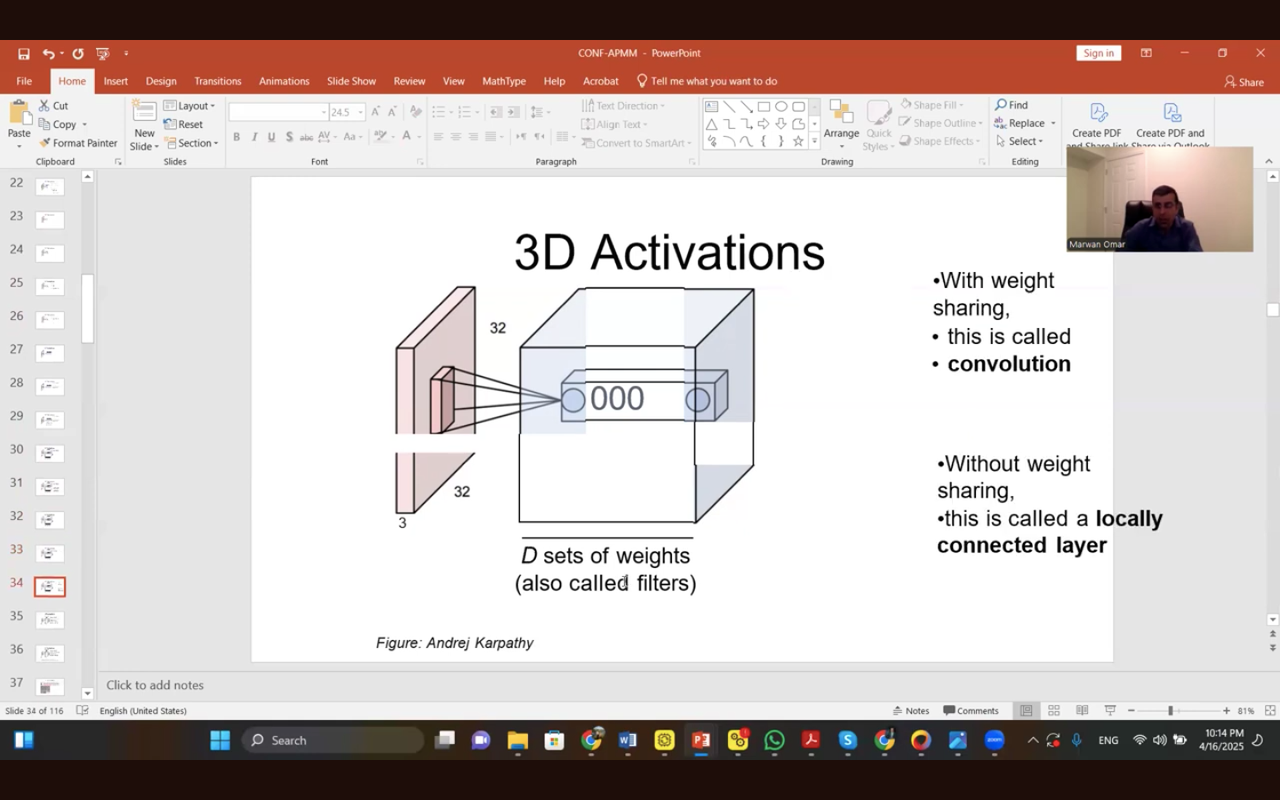
Symposium Chair: Dr. Marwan Omar, Associate Professor in Illinois Institute of Technology
This symposium focuses on the convergence of machine learning and optimization techniques, inviting contributions that explore both theoretical advancements and practical applications. Participants are encouraged to address a range of topics, including but not limited to: optimization algorithms for training machine learning models, hyperparameter tuning strategies, resource-constrained learning, feature selection and dimensionality reduction, reinforcement learning, combinatorial optimization, and evolutionary algorithms in ML. We also welcome case studies demonstrating the deployment of optimized ML models in real-world domains such as healthcare, finance, transportation, cybersecurity, and robotics. Submissions that explore emerging areas—such as federated learning, explainable AI, or optimization in deep neural architectures—are particularly encouraged. The symposium is open to researchers, practitioners, and students with an interest in bridging computational intelligence and optimization to build scalable, efficient, and intelligent systems.
Department of Computer and Information Sciences, University of Strathclyde
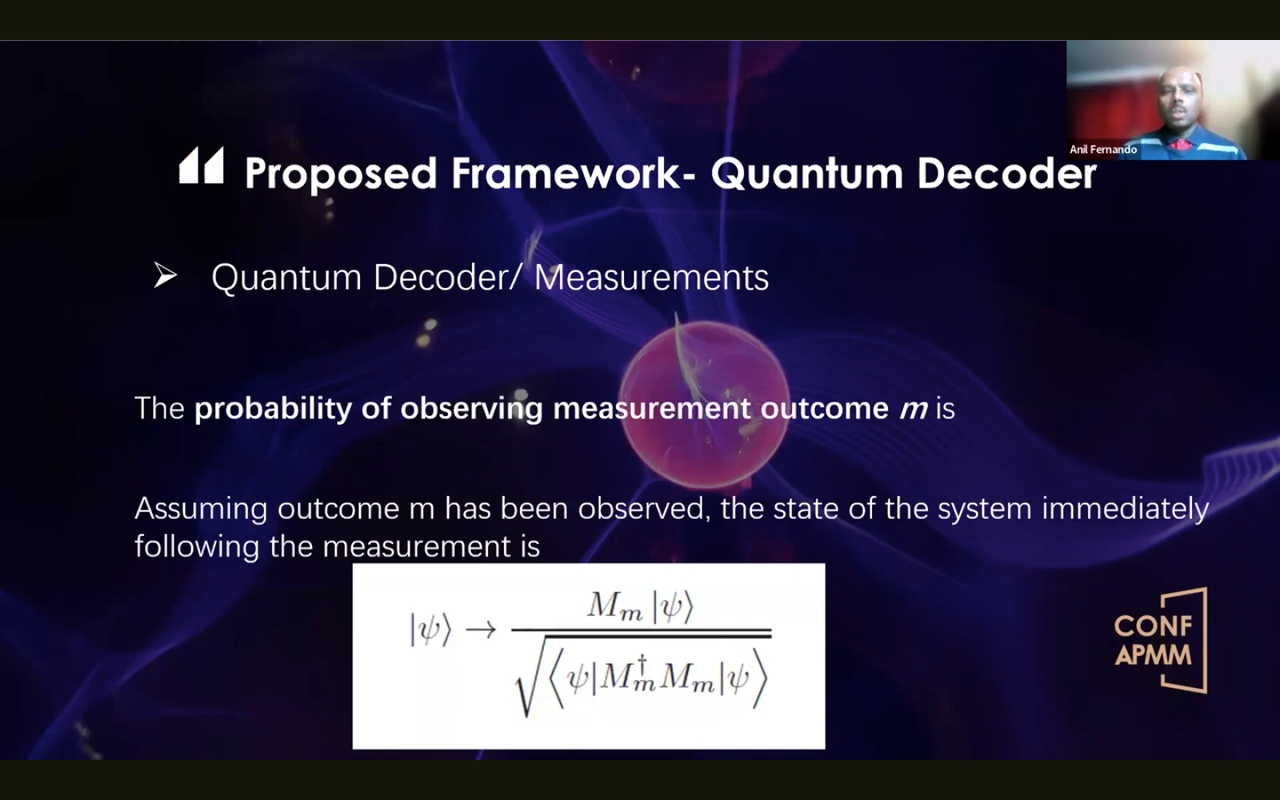
Symposium Chair: Dr. Anil Fernando, Professor in University of Strathclyde
The symposium focused on introducing a robust multi-qubit quantum communication system designed for high-fidelity image transmission over noisy quantum channels. Attendees gained a clear understanding of how multi-qubit encoding using superposition in high-dimensional Hilbert spaces enhances noise resilience, improves bandwidth efficiency, and supports reliable media transmission compared to single-qubit methods.
Key takeaways included insights into adaptive encoding strategies, where the system dynamically adjusts qubit sizes based on real-time channel conditions, and performance metrics showing significant gains in PSNR and SSIM for formats like JPEG and HEIF. The symposium also covered practical decoding techniques using Hadamard gates and error mitigation in the presence of quantum noise.
Interaction was encouraged through discussions on trade-offs between encoding complexity and performance, as well as future directions such as tailored quantum error correction and applications in video transmission. The session provided a solid foundation in both theoretical principles and practical implications, equipping participants with knowledge to assess quantum communication systems for real-world media delivery.




Dalian University of Technology
Symposium Chair: Dr. Shuxia Zhao, Associate professor in Dalian University of Technology
The symposium Simulation and Theory of Differential-Integral Equation in Applied Physics, held on September 27, 2025, at Dalian University of Technology, convened scholars to address the pressing need for utilization of both the low- and high- temperature plasmas. Organized by International College Beijing as part of the 3th International Conference on Applied Physics and Mathematical Modelling (CONF-APMM 2025), the symposium was chaired by Dr. Shuxia Zhao, Associate Professor at Dalian University of Technology.
The symposium brought together distinguished scholars from Dalian University of Technology, Ruhr University, and Qiqihar University. Together, they explored how differential-integral equation can be used to explore the plasma sources in the industry of Si-based material etching and functional film deposition and in the nuclear fusion field. Key themes included Tokomak MHD equilibrium, mass and energy self-coagulation dynamics, algebraic radio frequency (RF) sheath, discharge structure hierarchy, inductively coupled electronegative plasma, nanoparticle coagulation and charging dynamics, and pulsed-modulated RF acetylene discharges. Case studies and interdisciplinary discussions highlighted how the analytical theory and numerical technique of equation can collaborate to help people understand and utilize the laboratory man-made plasma.



Online Session
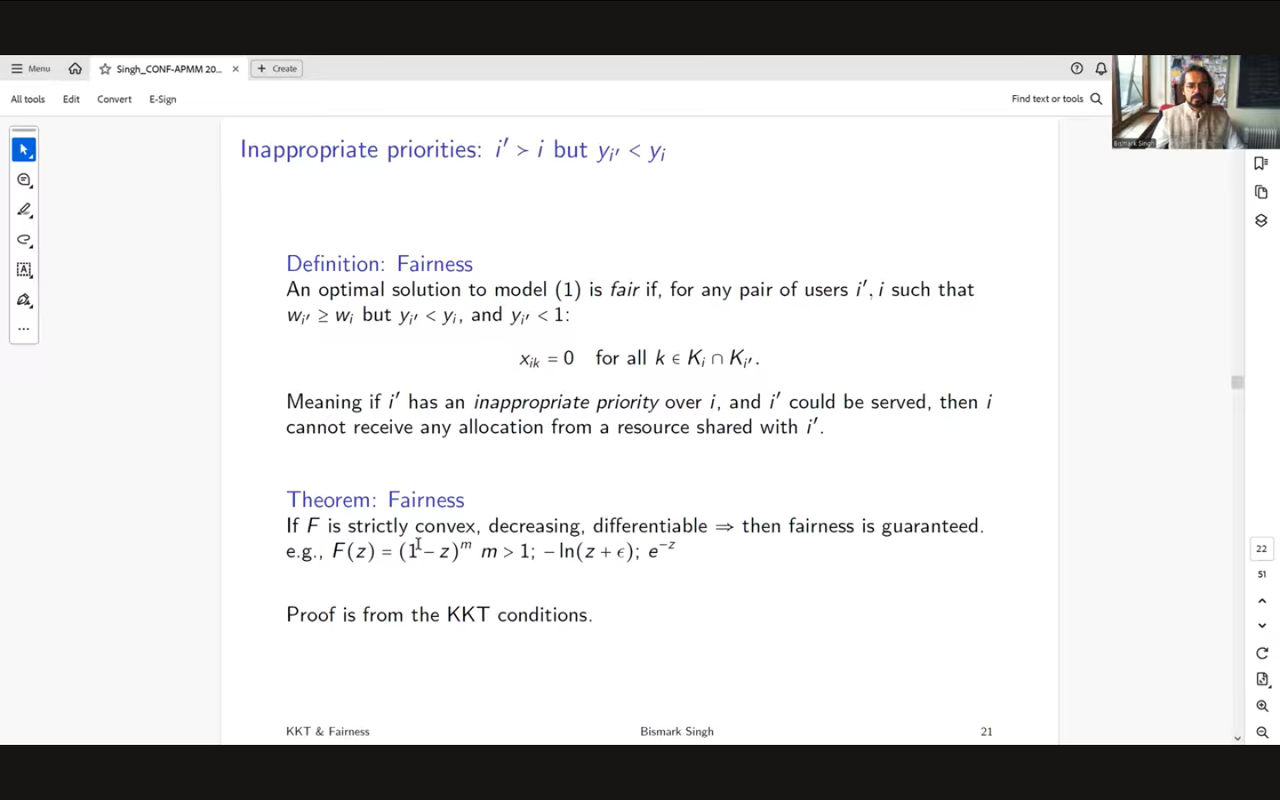
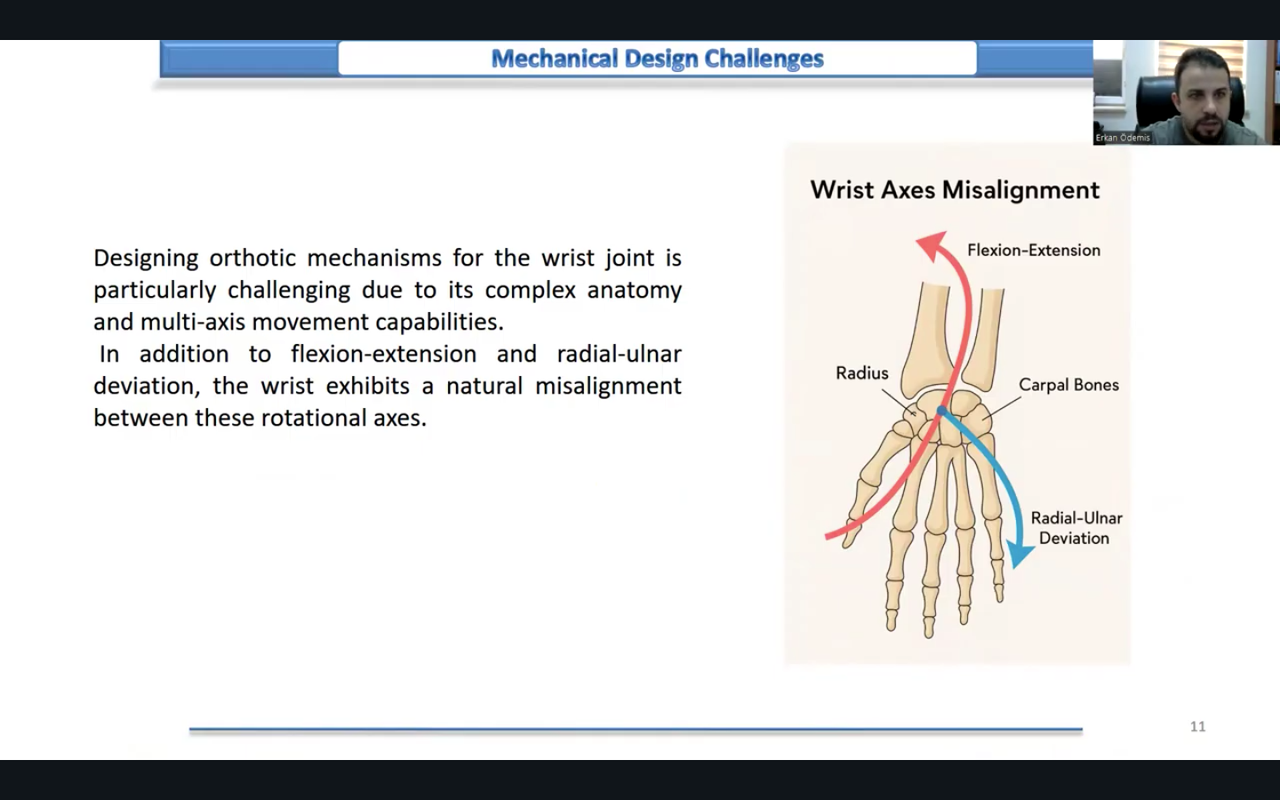
The online session of the 3rd International Conference on Applied Physics and Mathematical Modeling (CONF-APMM 2025) was held on October 31, 2025. Dr. Marwan Omar from Illinois Institute of Technology, Dr. Anil Fernando from University of Strathclyde, Dr. Bismark Singh from University of Southampton, and Dr. Erkan Ödemiş from Çukurova University have given keynote speech on related topics of mathematics and applied mathematics, applied physics, etc. Also, we invited authors of qualified papers to deliver oral presentations at the Online Session. Authors have presented their studies of applied physics, mechanical design, deep learning, etc. Questions from the audience were collected and answered by the presenters.
Highlights



Videos
You can find the Youtube Playlist of online session Here.
Publications
Conference proceedings
Accepted papers of CONF-APMM 2025 were published in conference proceedings, and were submitted to EI Compendex, Conference Proceedings Citation Index (CPCI), Crossref, CNKI, Portico, Engineering Village (Inspec), Google Scholar, and other databases for indexing. The situation may be affected by factors among databases like processing time, workflow, policy, etc.